
Dalam artikel ini saya akan bongkar habis habisan Cara Membuat alat arah kiblat menggunakan kompas, GPS, dan Arduino.
yang akan saya bahas disini adalah :
1. Keunggulan alat dibandingkan dengan yang lain, seperti Aplikasi Android, perhitungan M.excel dan Alat arah kiblat tanpa GPS.
2. Rumus Trigonometri Bola serta turunannya (Rumus menentukan Arah Kiblat)
3. Cara cek komponen vital (Kompas dan GPS) serta Kalibrasi kompas
4. Rancang bangun alat disertai dengan Desain dan Program (Tinggal ikuti aja tutorialnya), jika bingung bisa hubungi kami.

A. KEUNGGULAN
Dimanapun kita berada, alat ini dapat menentukan arah kiblat, tidak terikat dengan data internet (Offline) dan tidak mesti ribet input tempat seperti memasukan lokasi longitude dan latitude, Karena apa, karena alat ini berbasis Gps.
yang akan saya bahas disini adalah :
1. Keunggulan alat dibandingkan dengan yang lain, seperti Aplikasi Android, perhitungan M.excel dan Alat arah kiblat tanpa GPS.
2. Rumus Trigonometri Bola serta turunannya (Rumus menentukan Arah Kiblat)
3. Cara cek komponen vital (Kompas dan GPS) serta Kalibrasi kompas
4. Rancang bangun alat disertai dengan Desain dan Program (Tinggal ikuti aja tutorialnya), jika bingung bisa hubungi kami.

A. KEUNGGULAN
Dimanapun kita berada, alat ini dapat menentukan arah kiblat, tidak terikat dengan data internet (Offline) dan tidak mesti ribet input tempat seperti memasukan lokasi longitude dan latitude, Karena apa, karena alat ini berbasis Gps.
Alat ini juga tidak terikat dengan waktu, mau siang atau malam. Kita bisa menentukan arah kiblat yang akurat. Karena alat ini menggunakan kompas digital.
Tidak perlu ribet dengan perhitungan manual karena sudah Auto dan alat akan berbunyi + laser menyala ke depan saat posisi arah kiblat ditemukan.
Yang terakhir, ini yang paling2 sangat membedakan menurut saya adalah alat ini sudah dilengkapi dengan nilai deklinasi magnetik.

Tidak perlu ribet dengan perhitungan manual karena sudah Auto dan alat akan berbunyi + laser menyala ke depan saat posisi arah kiblat ditemukan.
Yang terakhir, ini yang paling2 sangat membedakan menurut saya adalah alat ini sudah dilengkapi dengan nilai deklinasi magnetik.

Mungkin anda sudah pernah nyari-nyari di internet tentang artikel yang memuat cara pembuatan alat penentu arah kiblat ini, tapi yaaa itu.....kebanyakan mereka hanya memposting hasilnya aja, atau penelitiannya aja, dan yang apes banget hanya posting materi-materinya aja. hehe
Anda senasib dengan saya dulu. hehe
makanya disini saya akan menjelaskan cara membuatan alat ini + programnya.
Enak banget kan ? ... iyalah, tinggal copas. hehe
Mungkin anda bertanya gini...!?
Emangnya gak rugi yah, hasil penelitian, hasil jerih payah kita, di bagikan secara gratis ?
Hehe... kalau menurut anda gratis, ya boleh- boleh saja. Tapi kalau menurut saya enggak. Karena setiap kebaikan pasti ada balasanya... Allah yang bayar, Allah yang jamin. Hhehe
Duuuh,, jadi ceramah gini ya. Heehe maaf ya, kebawa suasana siih
Okelah, kita langsung aja ke inti permasalahan kita disini...
= Alat / Hardware yang dibutuhkan =
Arduino, LCD 16x2, Modul Kompas HMC5883L, Modul GPS GY-NEO6MV2, Laser, Buzzer, kompas analog / kompas dari HP juga boleh. Dll.




= Software yang dibutuhkan =
Software Arduino dan M.Excel, desain rangkaian tambahan aja ya boleh pake sofware Fritzing.
B. RUMUS TRIGONOMETRI BOLA DAN TURUNANNYA
B. RUMUS TRIGONOMETRI BOLA DAN TURUNANNYA
Aturan cosinus dalam segitiga bola yaitu.
Cos a = cos b cos c + sin b sin c cos A
Cos b = cos a cos c + sin a sin c cos B ... (1)
Cos c = cos a cos b + sin a sin b cos C ... (2)



Kedua ruas dibagi dengan sin a sin b. Maka.


Maka, didapatkan,

Persamaan (3) bisa ditransformasikan kedalam bentuk lain.










D. RANCANG BANGUN ALAT ARAH KIBLAT


Persamaan (2) disubstitusikan ke persamaan (1).
Kedua ruas dibagi dengan sin a sin b. Maka.
Menurut aturan sinus dalam segitiga bola,
Maka, didapatkan,
Persamaan (3) bisa ditransformasikan kedalam bentuk lain.
Mengingat bahwa,
sin (x) = Cos (90 - x)
cos (x) = Sin (90 - x)
tan (x) = Cot (90 - x)
Sehingga,.
Dengan demikian persamaan (4) menjadi.
Setelah didapatkan rumus akhirnya, maka langkah selanjutnya adalah, memasukan rumus diatas ke program arah kiblat di software arduino dengan mengubahnya ke algoritma program..
Nah sebelum itu.... alangkah lebih bagusnya kita cek komponen dulu, berfungsi atau tidaknya.
C. CARA CEK KOMPONEN VITAL
Untuk download Full Library arah kiblat, bisa anda Klik DISINI
Langkah PERTAMA adalah perangkaian alat, yaitu : hubungkan Gps ke Arduino seperti gambar dibawah :

Setelah itu.. buka library Gps seperti gambar dibawah, dan Upload contoh programnya.
Indikator alat ini ditandakan dengan berkedipnya Led pada Gps, hal ini menandakan bahwa Gps sedang melakukan pengambilan data dari satelit. Anda bisa cek diserial monitor Arduino, dan jangan lupa Baudrate Serial nya harus sama ya 115200.
Jika Gps berfungsi normal, nanti akan tampil data seperti gambar dibawah.

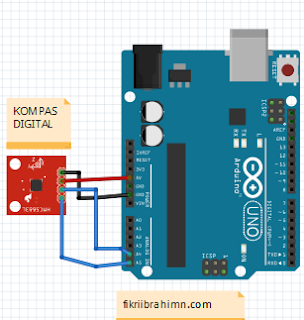
Langkah KEDUA adalah pengecekan modul Kompas, seperti biasa. Hubungkan dulu ke Arduino ya.
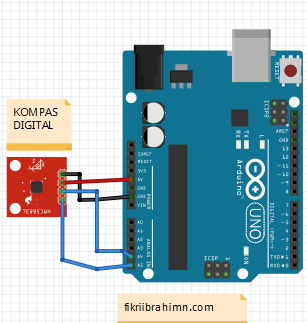
Upload contoh program Compas pada library, maka akan muncul data seperti gambar dibawah,

Sebelum alat digunakan untuk pengambilan data, alat perlu dikalibrasi terlebih dahulu supaya data yang dihasilkan sesuai dengan literatur. Dimana kalibrasinya dibandingkan dengan kompas manual.
Karena sudut utara kompas sebenarnya tidak mengarah ke utara sejati, maka nilai deklinasi magnetik sangat berpengaruh dalam penentuan arah kiblat.
Deklinasi magnetik dapat diakses dari http://magnetic-declination.com/. Untuk dijadikan kalibrasi kompas, maka diambil titik-titik deklanasi magnetik dengan memasukan rumus regresi linear yaitu deklinasi magnetik terhadap longitude atau bujur tempat.
Tabel 4.1: Kalibrasi kompas HMC5883L terhadap kompas magnetik
No
|
Arah Kompas
|
HMC5883L
|
Kompas Manual
|
Selisih
|
1
|
Utara
|
316°
|
360°
|
44° T
|
2
|
Timur
|
135°
|
90°
|
45° B
|
3
|
Selatan
|
202°
|
180°
|
22° B
|
4
|
Barat
|
250°
|
270°
|
20° T
|
Dari diatas didapatkan grafik kalibrasi kompas magnetik terhadap kompas HMC5883L seperti pada Gambar dibawah ini.
Karena modul kompas HMC5883L tidak dilengkapi dengan deklinasi magnetik dan modul GPS GY-NEO6MV2 tidak dapat mengakses deklinasi magnetik, maka modul kompas digital perlu di kalibrasi ulang dengan menambahkan deklinasi magnetik setiap tempat berdasarkan acuan dari http://magnetic-declination.com/.
Pengambilan data deklanasi magnetik pada penelitian ini (Tabel dibawah) dibatasi dari Pulau Jawa sampai Pulau Nusa Tenggara Timur (NTT)....ini bisa anda tambahkan lagi ya. (update data deklinasi magnetik 5-10 tahun kedepan).
Dari diatas didapatkan grafik kalibrasi kompas HMC5883L dengan menggunakan metode polynominal orde ke tiga deklinasi magnetik terhadap bujur tempat seperti pada Gambar dibawah ini.
") |
| Grafik kalibrasi kompas HMC5883L (deklinasi magnetik terhadap bujur tempat) |
contoh gambar pengambilan data deklinasi magnetik daerah Cibiru Bandung.

Rancangan desain diatas bisa di sesuaikan lagi ya..sesuai serela aja, bisa ditambah Laser atau Motor Servo juga.
Noted :
Baca Juga Jurnal Penelitian tentang Alat ini, bisa anda Akses DISINI
Baca juga Proposal Tugas Akhir tentang alat ini DISINI
Dari GPS Global Positioning System akan didapat data alokasi waktu dan letak geografis tempat, sedangkan dari kompas didapatkan data perubahan derajat kompas terhadap medan magnet bumi.
Karena pada dasarnya arah kompas yang menunjukan ke utara itu bukan menunjuk ke utara sejati, yaitu ada deklanasi antara utara bumi dan utara magnetik. Maka, kompas harus melalui proses kalibrasi dahulu dengan menambahkan nilai deklanasi magnetiknya. Tanpa proses kalibrasi, data yang akan dihasilkan tidak akan akurat.
Proses ini sangatlah rumit dan dalam pengerjaannya dibutuhkan ketelitian. dikarenakan perubahan atau besar deklinasi magnetik disetiap titik dipermukaan bumiberbeda. Kompas digital ini juga sama dengan kompas lainnya yaitu rentan terhadap barang-barang elektronik yang memiliki hubungan dengan kemagnetan
BACA JUGA :
BACA JUGA :







